
弹性线问题与数值求解
发布时间:
一根绳子,当受到一定的力,弯矩,扭矩时他的形状是什么样的?
- 预备工作
- 建立Euler弹性线方程
- 分析求解
- 数值求解
- 黎曼空间中的弹性线
- 附录Cpp代码
预备工作
分部积分法的妙用
浅谈分部积分公式中通过迭代得到了:
\[\int gf^{\alpha}dx+(-1)^{\alpha+1}\int fg^{\alpha}dx=\sum_{i=0}^{\alpha-1}(-1)^{i}f^{\alpha-1-i}g^{i}\]通过这个公式也得到了高阶Lagrange方程,这里简单的总结一下,方便后边使用:
含有高阶导数的Lagrange方程为:
\[\frac{d^2}{dx^2}\left( \frac{\partial L}{\partial y_{xx}} \right) -\frac{d}{dx}\left( \frac{\partial L}{\partial y_x} \right) +\frac{\partial L}{\partial y}=0\]对应守恒量:
\[\epsilon \left( \frac{\partial L}{\partial y_x}-\frac{d}{dx}\frac{\partial L}{\partial y_{xx}} \right) +\dot{\epsilon}\frac{\partial L}{\partial y_{xx}}=const\]几个椭圆函数
一些符号变换而已
建立Euler弹性线方程
不考虑弹性线的伸长时,弹性线的能量可以写为:
\[E=\frac{1}{2}\int{\kappa ^2\left( s \right) +\tau ^2\left( s \right) ds}\] \[||r'(s)||=1\]这个不考虑伸长有一定的物理意义,并不意味着弹性线的弹性系数很大。比如说一根松弛状态弯曲的橡皮筋,虽然橡皮筋很容易伸缩变形,但是由于绳子并没有绷紧,因此也可以看成不考虑弯曲能的情况。
在不考虑转动时,能量仅仅由曲率进行贡献。
曲率与矢径的关系为:
\[\tau=||r''(s)||\]利用Lagrange乘数法,得到能量泛函:
\[E=\int{||r''\left( s \right) ||^2+\Lambda \left( ||r'\left( s \right) ||^2-1 \right)}ds\]这时应用前面的二阶导数的Lagrange方程,得到:
\[r''''\left( s \right) -(\Lambda r'\left( s \right))' =0\]守恒量为:
\[\epsilon \left( s \right) \cdot \left( \Lambda -r'''\left( s \right) \right) +\epsilon'\left( s \right) \cdot r''\left( s \right) =const=J\]上面得到的只是矢径需要满足的关系,要想把矢径和曲线的内禀量(什么是内禀量?内禀量是系统本身的性质,不随坐标系选取而改变,这里指的是曲率和挠率。)联系起来,需要把矢径投影到Frenet标架(不一定是Frenet标架,只要是曲线的随体标架都可以)中,并利用Frenet关系进行化简。
(Add:如何理解内禀坐标? 首先,对于一个空间曲线来说,选取不同位置为基点进行描述,矢径参数方程肯定是不同的,但是$r’(s)$这个量与选取基点的方式无关。这也说明了为什么描述曲线自身性质的Frenet标架中不会含有$r$,而含有$r$的各阶导数。)
满足关系式:
\[\begin{cases} r'=T \\ T'=\kappa N \\ N'=-\kappa T+\tau B \\ B'=-\tau N \end{cases}\]投影后得到:(略去大量计算)
\[\begin{aligned} &\left( \Lambda'\left( s \right) +3\kappa \left( s \right) \kappa'\left( s \right) \right) T \\ &\quad -\left( -\Lambda \left( s \right) \kappa \left( s \right) +\kappa'' \left( s \right) -\kappa \left( s \right) \tau ^2\left( s \right) -\kappa ^3\left( s \right) \right) N \\ &\quad -\left( 2\tau \left( s \right) \kappa '\left( s \right) +\kappa \left( s \right) \tau'\left( s \right) \right) B=0 \end{aligned}\]要满足必须让三个分量为零:
\[\begin{cases} \Lambda' \left( s \right) +3\kappa \left( s \right) \kappa' \left( s \right) =0 \\ \kappa'' \left( s \right) -\Lambda \left( s \right) \kappa \left( s \right) -\kappa \left( s \right) \tau ^2\left( s \right) -\kappa ^3\left( s \right) =0 \\ 2\tau \left( s \right) \kappa'\left( s \right) +\kappa \left( s \right) \tau'\left( s \right) =0 \end{cases}\]上式积分得到:
\[\begin{cases} \Lambda \left( s \right) =-\frac{3}{2}\kappa ^2\left( s \right) +\frac{\lambda}{2} \\ \kappa''\left( s \right) +\frac{1}{2}\kappa ^3\left( s \right) -\frac{\lambda}{2}\kappa \left( s \right) -\frac{c^2}{k^3\left( s \right)}=0 \\ \kappa ^2\left( s \right) \tau \left( s \right) =const=c \end{cases}\]后续只需要通过边界条件求解方程,然后把参数空间$(\kappa,\tau,s)$转换到欧氏空间$(x,y,z)$中。
分析求解
?????????????
数值求解
弹性线问题中,为了方便起见,总是以内禀参数进行求解的。但是要想进行可视化,必须进行坐标的变换,简而言之就是从内禀参数空间变换到欧式空间。这个变换过程就是求解Frenet方程。
数值求解的关键: 求解Frenet方程,把参数空间转化为欧氏空间。
首先会想到二维情况如下图:
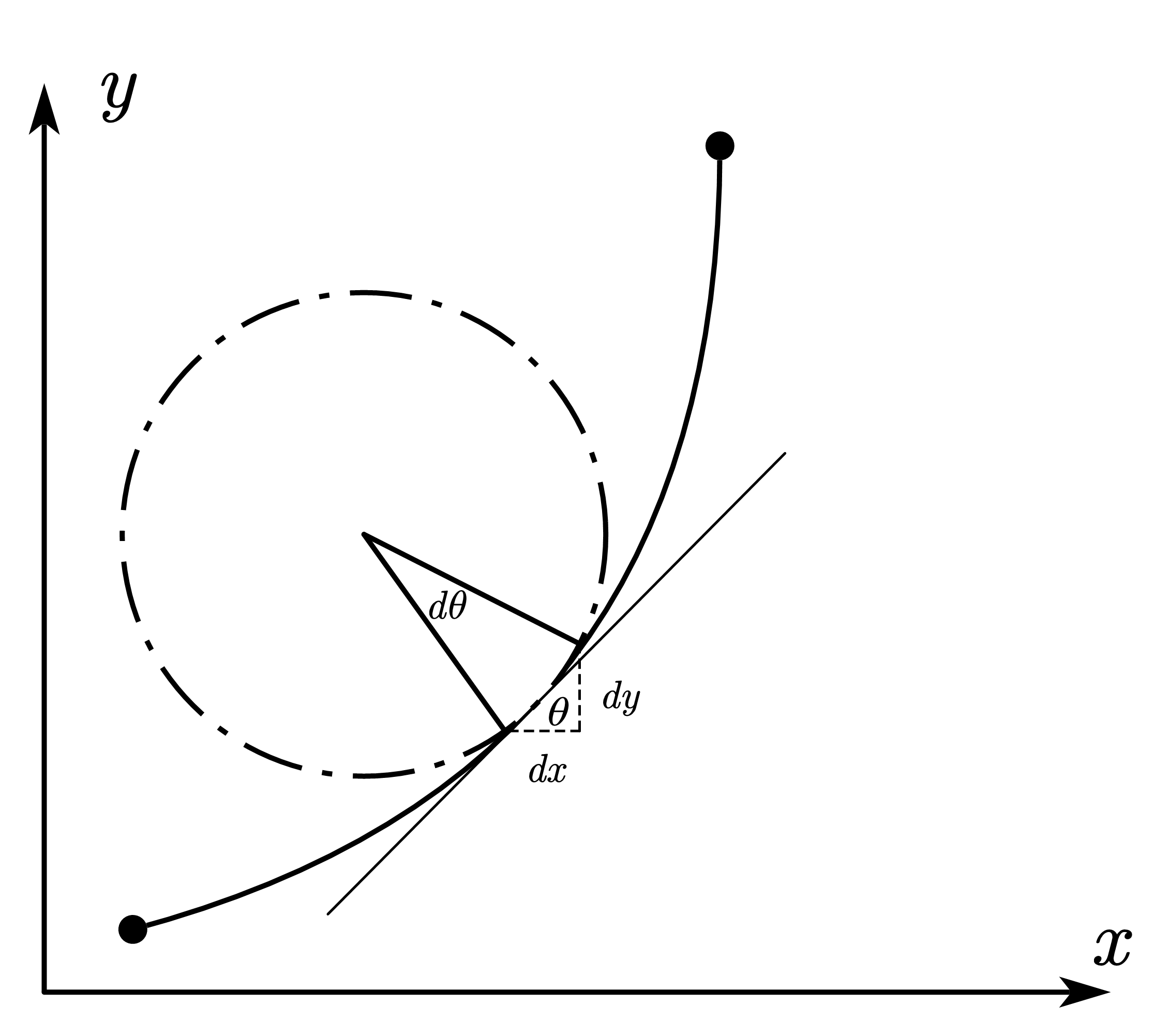
猛一看这不是很简单嘛。啪!很快啊!于是通过几何关系很快就写出了参数空间与欧氏空间的变换关系。
\[\begin{cases} dx=\cos \theta ds \\ dy=\sin \theta ds \\ \kappa =\theta _s \end{cases}\]离散化:
\[\begin{cases} \theta _k=\theta _{k-1}+\kappa \left( \left( k-1 \right) \Delta s \right) \Delta s \\ x_k=x_{k-1}+\cos \theta _{k-1}\Delta s \\ y_k=y_{k-1}+\sin \theta _{k-1}\Delta s \end{cases}\]但是,如果考虑三维空间的情况这个几何关系是什么呢?
也就是说,当从曲线上的一点$(x_0,y_0,z_0)$向前前进了$ds$的距离,这个前进的过程中既有弯曲又有扭转,到达的位置怎么表达呢?
要想和二维情况一样通过几何直觉来得到这个关系就很难了。
于是,可以发现,上面的通过所谓的“几何直觉”得到转换关系的过程只不过是参数化的过程,借助中间参数$\theta$进行转换。
\[ds=\sqrt{dx^2+dy^2} \\ \begin{cases} dx=\cos \theta ds \\ dy=\sin \theta ds \end{cases}\]三维可不可以照猫画虎来一遍?
于是想到,同样把弧长进行参数化如下:
\[ds=\sqrt{dx^2+dy^2+dz^2} \\ \begin{cases} dx=\cos \theta \sin \varphi ds \\ dy=\sin \theta \sin \varphi ds \\ dz=\cos \varphi ds \end{cases}\]$(\theta,\tau)$与内禀参数的关系怎么写?
通过Frenet方程求解得到:
\[\kappa ^2=\left\| \frac{d\left( \frac{dx}{ds},\frac{dy}{ds},\frac{dz}{ds} \right)}{ds} \right\| ^2 ={\theta _s}^2\sin ^2\varphi +{\varphi _s}^2\] \[\begin{aligned} \tau &=||\dot{B}||=||\dot{T}\times N+T\times \dot{N}|| \\ &=\left\| \frac{d\left( \frac{T \times \dot{T}}{\kappa} \right)}{ds} \right\| \\ &=\theta_s\cos\varphi+\frac{\theta_{ss}\varphi_s\sin\varphi+\theta_s(\varphi_s^2\cos\varphi-\varphi_{ss}\sin\varphi)}{\theta_s^2+\sin^2\varphi+\varphi_s^2} \end{aligned}\]到这一步,只要求解出$(\kappa,\tau)$和$(\theta,\phi)$的关系就能把参数空间转化为欧氏空间。但是可以发现上面是一个复杂的非线性方程,离散起来需要花费很大功夫,因此这个方法行不通。
绕了一个大弯,发现绕进了胡同里。
既然参数空间的转化与Frenet方程有关,为何不直接求解Frenet方程?
那么如何把Frenet方程转化到欧氏空间呢?
通过$T(s)=r’(s)$这个关系式。
至此已经有了求解思路,感觉这个思考过程很有意思。
也许前面的弯路并没有白走,二维情况下的几何直觉引导我们想到三维情况。而三维情况下几何直觉不管用了,又得回去归纳前面通过“几何直觉”求解二维问题的流程。好不容易归纳好了,却发现同样的方法三维问题根本没法解。而这个时候发现了三维求解过程中与二维情况的不同:利用了Frenet方程。然后想到可能与Frenet方程有关,最终去求解Frenet方程,得到了参数空间向欧氏空间转换的一般方法。
离散Frenet方程以及$T=r’(s)$得到:
\[\begin{cases} T_k=T_{k-1}+\Delta s \kappa ( (k-1)\Delta s ) N_{k-1} \\ N_k=N_{k-1}-\Delta s \kappa ( (k-1)\Delta s ) T_{k-1}+\Delta s\tau ( (k-1)\Delta s ) B_{k-1} \\ B_k=B_{k-1}-\Delta s \tau ( (k-1)\Delta s ) N_{k-1} \\ r_k=r_{k-1}+\Delta s*T_{k-1} \end{cases}\]至此,Euler弹性线(仅考虑弯曲能)的求解思路总结如下:
- 求解弹性线方程 \(\kappa'' \left( s \right) +\frac{1}{2}\kappa ^3\left( s \right) -\frac{\lambda}{2}\kappa \left( s \right) -\frac{c^2}{k^3\left( s \right)}=0\)
- 得到内禀参数$(\kappa(s),\tau(s))$的演化规律
- 通过Frenet方程求解$(T,N,B)$标架的演化规律
- 通过$r’(s)=T$把参数空间映射到欧氏空间
PS: 以上是一个关于曲率的二阶方程,可以通过给定初始曲率以及曲率导数进行迭代(初值问题),也可以通过给定两个端点的导数利用打靶法进行求解(边值问题)。此外,Frenet方程的求解用Euler法会产生很大误差,连求解基本的圆误差都会很大,用预报矫正算法就会好很多。
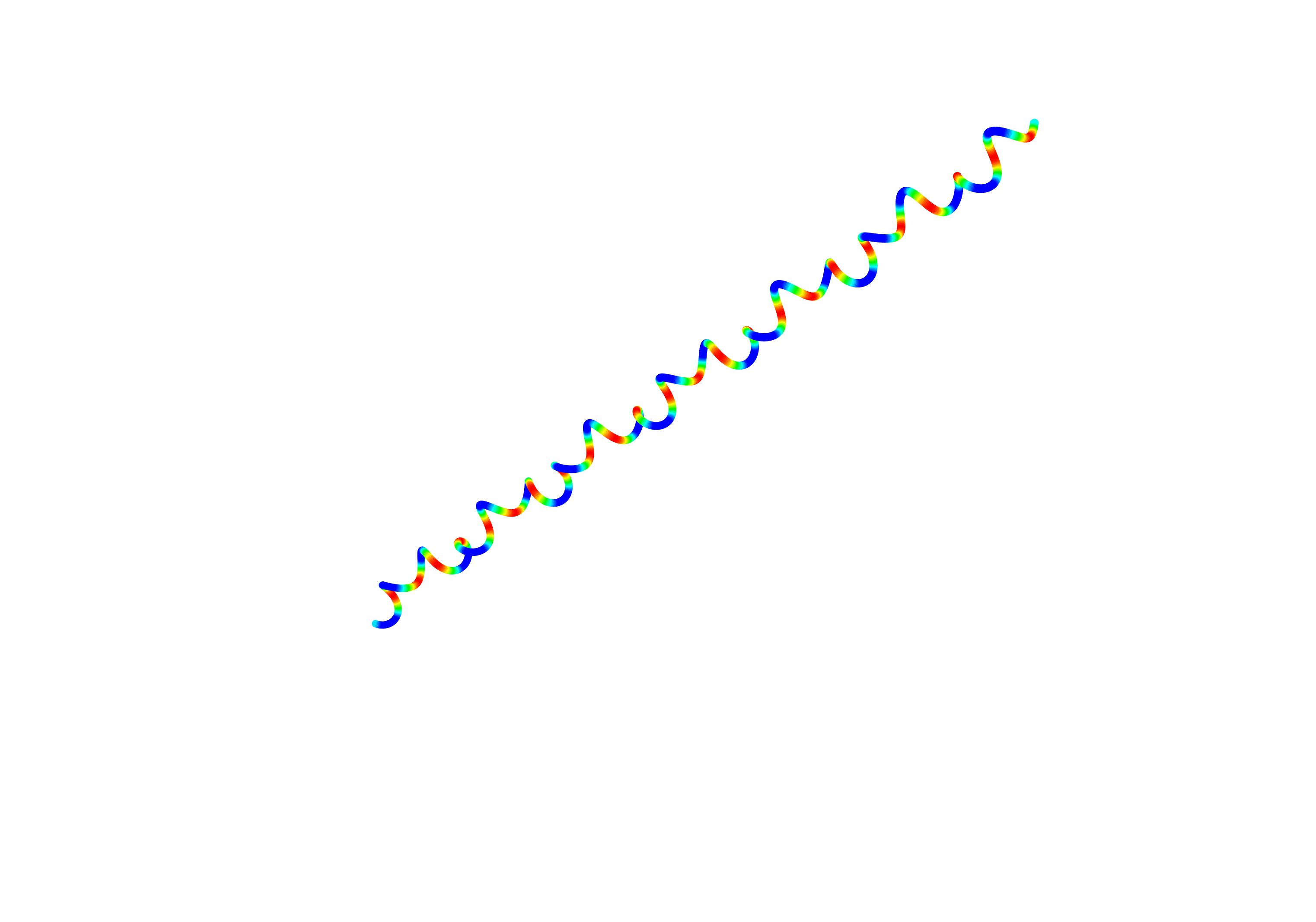
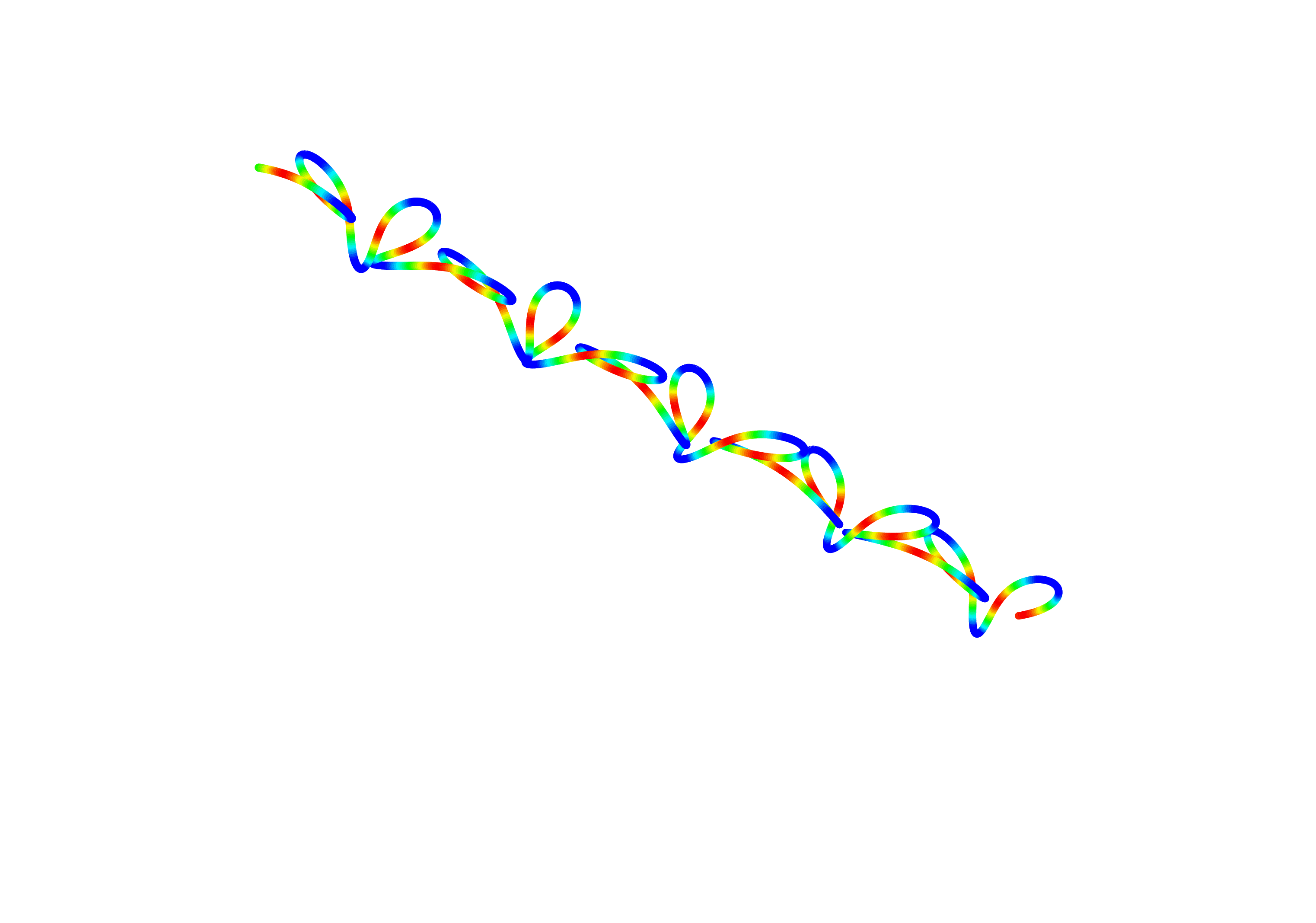
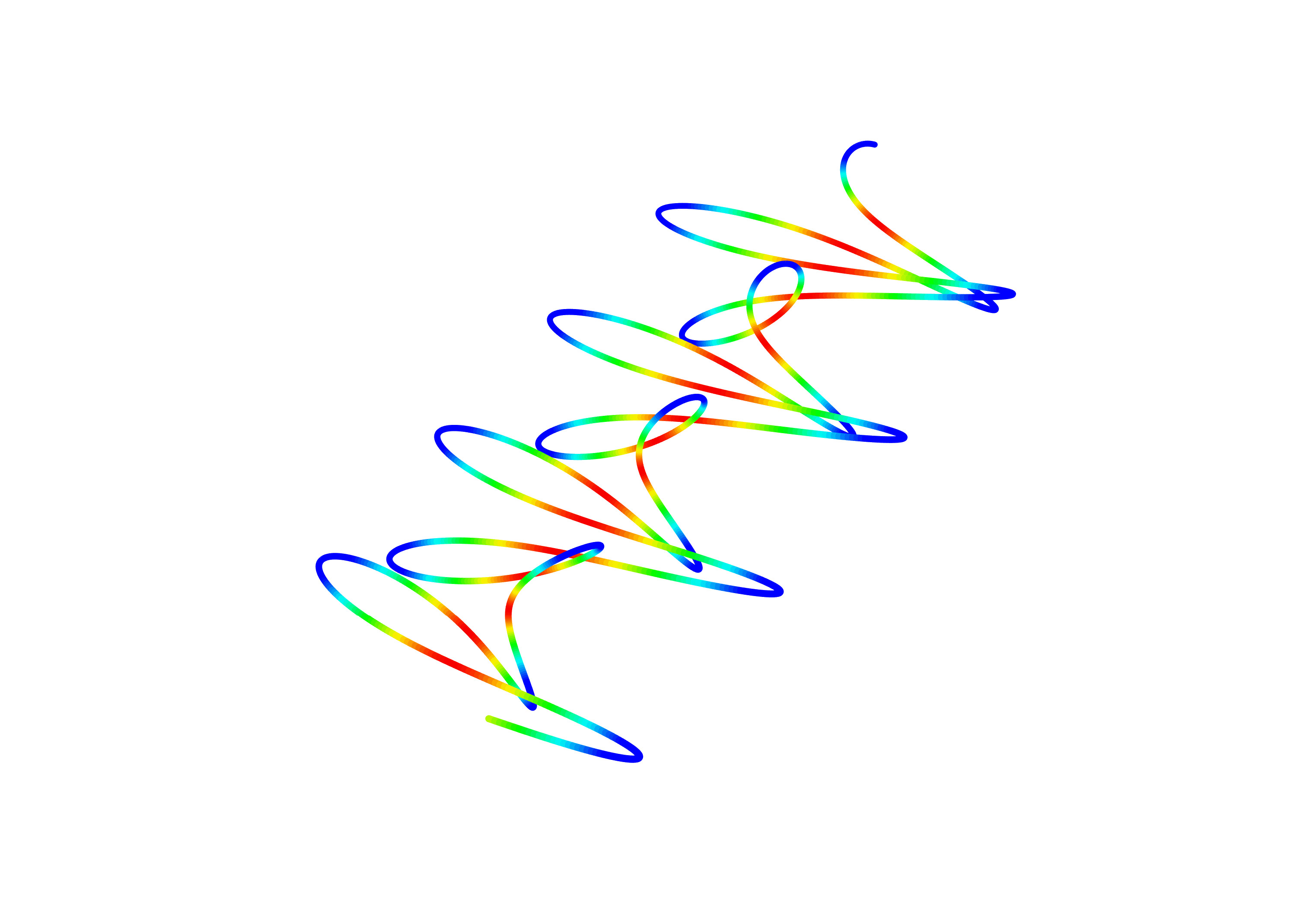
上面已经给出了求解的方法,下面是几个求解结果的可视化(按照曲率着色)
| $\kappa(0)$ | $\tau(0)$ | $\kappa(s)$ | $\lambda$ | s |
|---|---|---|---|---|
| 2 | 1 | 2 | 1 | 50 |
| 1.5 | 1 | 0.7 | 0.8 | 50 |
| 0.7 | 1 | 2 | 0.75 | 50 |
黎曼空间中的弹性线
?????????????
Cpp代码
主函数(main.cpp):
#############Elastica类(EulerElasticaRod.h)#############
#include<iostream>
#include<fstream>
#include<math.h>
using namespace std;
struct Para{
static const int N=2000;
double kappa[N]{},tau[N]{},coord[3][N];
};
class DER{
public:
// Para ks2coord();
DER(Para &p1,double s1,double* kppa01,double k01,double dk01,double tau0,double ks,double lambda1);//构造函数
//不需要析构函数!!
Para SolveER();
double erfen();
double f();
double f1();
private:
Para p;double s;double* kppa0;double k0;double dk0;double tau0;double ks;double lambda;
};
DER::DER(Para &p1,double s1,double* kppa01,double k01,double dk01,double tau01,double ks0,double lambda1){
p=p1;s=s1;kppa0=kppa01;k0=k01;dk0=dk01;ks=ks0;lambda=lambda1;tau0=tau01;
}
//就是不需要析构函数!!!
//定义public函数
Para DER::SolveER(){
int NN=p.N;
double ds=s/NN;
double c=k0*k0*tau0;
p.kappa[0]=k0;p.kappa[1]=ds*dk0+k0;p.tau[0]=tau0;
for (int i =1;i<NN-1;i++)
{
p.kappa[i+1]=2*p.kappa[i]-p.kappa[i-1]+pow(ds,2)*(-0.5*pow(p.kappa[i],3)+0.5*lambda*p.kappa[i]+pow(c,2)/pow(p.kappa[i],3));
p.tau[i+1]=c/pow(p.kappa[i+1],2);
}
return p;
}
double DER::erfen(){
cout<<"ks"<<" "<<"err"<<endl;
double ff0=this->f();double ff1=this->f1();
double eps=1e-6;
while(true){
dk0=dk0-(ff0-ks)/ff1;
ff0=DER(p,s,kppa0,k0,dk0,tau0,ks,lambda).f();
ff1=DER(p,s,kppa0,k0,dk0,tau0,ks,lambda).f1();
cout<<ff0<<" "<<abs(ff0-ks)<<endl;
if (abs(ff0-ks)<eps) break;
}
return dk0;
}
double DER::f(){
Para re=SolveER();
return re.kappa[re.N-1];
}
double DER::f1(){
double ddk=0.001;
return (DER(p,s,kppa0,k0,dk0+ddk,tau0,ks,lambda).f()-DER(p,s,kppa0,k0,dk0,tau0,ks,lambda).f())/ddk;
}
#############主函数#############
#include "EulerElasticaRod.h"
Para ks2coord(Para &p, double s) {
double Frenet[3][p.N][3] {}, ds = s / p.N;
Frenet[0][0][0] = 1;
Frenet[0][0][1] = 0;
Frenet[0][0][2] = 0;
Frenet[1][0][0] = 0;
Frenet[1][0][1] = 1;
Frenet[1][0][2] = 0;
Frenet[2][0][0] = 0;
Frenet[2][0][1] = 0;
Frenet[2][0][2] = 1;
for (int j = 0; j < 3; j++) {
p.coord[j][0] = 0;
for (int i = 1; i < p.N; i++) {
Frenet[0][i][j] = Frenet[0][i - 1][j] + p.kappa[i - 1] * ds * Frenet[1][i - 1][j];
Frenet[2][i][j] = Frenet[2][i - 1][j] - p.tau[i - 1] * ds * Frenet[1][i - 1][j];
Frenet[1][i][j] = Frenet[1][i - 1][j] - p.kappa[i - 1] * ds * Frenet[0][i - 1][j] + p.tau[i - 1] * ds * Frenet[2][i - 1][j];
//预报校正算法 PS:简单的Euler法会导致比较大的误差,不信试试看!
Frenet[0][i][j] = Frenet[0][i - 1][j] + p.kappa[i - 1] * ds * (Frenet[1][i - 1][j] + Frenet[1][i][j]) / 2;
Frenet[2][i][j] = Frenet[2][i - 1][j] - p.tau[i - 1] * ds * (Frenet[1][i - 1][j] + Frenet[1][i][j]) / 2;
Frenet[1][i][j] = Frenet[1][i - 1][j] - p.kappa[i - 1] * ds * (Frenet[0][i - 1][j] + Frenet[0][i][j]) / 2 + p.tau[i - 1] * ds * (Frenet[2][i - 1][j] + Frenet[2][i][j]) / 2;
p.coord[j][i] = p.coord[j][i - 1] + Frenet[0][i - 1][j] * ds;
}
}
return p;
}
int main() {
Para p;
double s = 50, kappa[p.N] {}, k0 = 0.9, dk0 = 0.9, tau0 = 1, lambda = 0.75, ks = 2;
double ppp = DER(p, s, kappa, k0, dk0, tau0, ks, lambda).erfen();
Para q = DER(p, s, kappa, k0, ppp, tau0, ks, lambda).SolveER();
// dk0=DER(p,s,kappa,k0,dk0,tau0,ks,lambda).erfen();
Para ret = ks2coord(q, s);
cout << ret.kappa[q.N - 1] << endl;
ofstream out("out.data");
for (int i = 0; i < p.N; i++) {
out << ret.coord[0][i] << " " << ret.coord[1][i] << " " << ret.coord[2][i]<<" "<<ret.kappa[i]<< endl;
}
out.close();
return 0;
}