
Contact between cylinder and ribbon
发布时间:
This note presents the contact between a cylinder and a ribbon.
We consider the contact problem of between a cantilever beam and a rigid cylinder, as shown in Fig.1 (b):
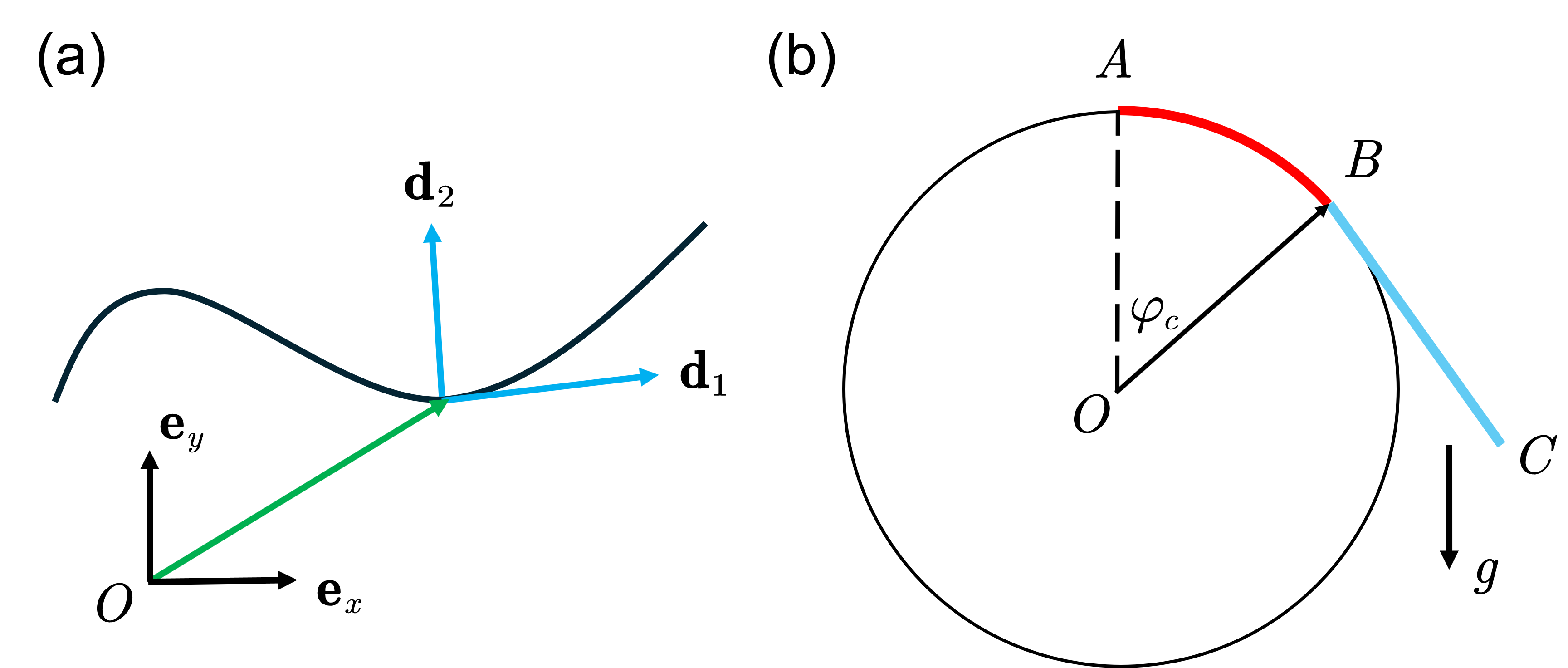
The beam can be divided into two parts: the contact part (CP, A-B, red) and the non-contact part (NCP, B-C, blue). The geometry of CP is completely determined by the cylinder and the configuraiton of NCP is determined by the force in point B and the gravity.
We consider a 2D elastica as shown in Fig.1 (a), the vector equation can be written as:
\[\begin{cases} \mathbf{F}_s+g\mathbf{e}_z=0\\ \mathbf{M}_s+\mathbf{d}_1\times \mathbf{F}=0\\ \mathbf{r}_s=\mathbf{d}_1\\ \end{cases}\]We expand the force $\mathbf{F}$ in local frame, and we have $\mathbf{F}=F_1\mathbf{d}_1+F_2\mathbf{d}_2$. After some simplification of 2D rotation, we get the components form of control equation:
\[\begin{cases} \left( F_1 \right) _s-\omega F_2-g\sin \theta =0\\ \left( F_2 \right) _s+\omega F_1-g\cos \theta +p(s)=0\\ B\left( \omega \right) _s+F_2=0\\ \left( \theta \right) _s=\omega\\ \left( x \right) _s=\cos \theta\\ \left( y \right) _s=\sin \theta\\ \end{cases} \tag{1}\]where $g$ is the gravity and $p(s)$ is the contact pressure from the cylinder.
Note that for the red part, we have the geometry constraint $\omega=-1/R$, the Eq. (1) can be simplified as:
\[\begin{cases} F_1=Rg\left( \cos \theta -\cos \varphi _c \right) +F_{1}^{B}\\ F_2=0\\ p\left( s \right) =g\left( 2\cos \theta -\cos \varphi _c \right) +F_{1}^{B}/R\\ \end{cases}\]Note that the contact pressure in point B is 0, which means $p(\varphi_c)=0$, we can solve the axis force in connection point B:
\[F_1^B=-gR\cos\varphi_c\]Now we will solve the NCP, the boundary condition can be written as:
\[\begin{cases} F_1\left( L-R\varphi _c \right) =0\\ F_2\left( L-R\varphi _c \right) =0\\ \omega \left( L-R\varphi _c \right) =0\\ \omega\left( 0 \right) =-1/R\\ \theta \left( 0 \right) =-\varphi _c\\ y\left( 0 \right) =R\cos \varphi _c\\ x\left( 0 \right) =R\sin \varphi _c\\ \end{cases}\]Actually, 6 BCs are enough for solving the BVP, however, there are 7 BCs, which means the additional 1 BC will be used for solving the $\varphi_c$.
Note that axis and shear forces are not continuous in B, which is required by the equilibrium of the elastica in contact point. This is due to the deformation of the cross-section.
A more exact model considering the shear of cross-section may can be developed in the future.