杆边界条件的确定方法
发布时间:
如何确定杆的边界条件?
三维空间中欧拉角的转动,当比较复杂的时候很难一次性想清楚。如何确定Kirchhoff杆正确的边界条件呢?下面给出一种直接求解的方法。
确定杆两端在全局和局部标架中的表达
假设全局标架表达为单位矩阵 $\mathbf{E}$,左端局部标架表达为 $\mathbf{D_0}$,右端局部标架表达为 $\mathbf{D_1}$。全局与局部标架之间通过转动矩阵变换得到:
\[\mathbf{D}_0=\mathbf{R}_0\mathbf{E}\] \[\mathbf{D}_1=\mathbf{R}_1\mathbf{E}\]我们只需要通过 $\mathbf{R_0}$ 和 $\mathbf{R_1}$ 求解边界条件即可。这里我们展示通过两种方法得到相同的结果,第一种方法为直接通过四元数转动矩阵求解,第二种方法为先反求具有明确物理意义的欧拉角,再通过欧拉角与四元数之间的关系求解边界条件。
四元数直接求解
四元数的转动矩阵为:
\[\mathbf{Q}=\begin{pmatrix} q_{0}^{2}+q_{1}^{2}-q_{2}^{2}-q_{3}^{2} & 2q_0q_3+2q_1q_2 & 2q_1q_3-2q_0q_2\\ 2q_1q_2-2q_0q_3 & q_{0}^{2}-q_{1}^{2}+q_{2}^{2}-q_{3}^{2} & 2q_0q_1+2q_2q_3\\ 2q_0q_2+2q_1q_3 & 2q_2q_3-2q_0q_1 & q_{0}^{2}-q_{1}^{2}-q_{2}^{2}+q_{3}^{2} \end{pmatrix}\]通过 $\mathbf{R_0}=\mathbf{Q}$ 以及 $\mathbf{R_1}=\mathbf{Q}$ 求出对应四元数的边界条件。
首先得到:
\[\begin{cases} R_{23}-R_{32}=4q_0q_1\\ R_{31}-R_{13}=4q_0q_2\\ R_{12}-R_{21}=4q_0q_3\\ 4q_{0}^{2}-1=R_{11}+R_{22}+R_{33} \end{cases}\]其次可以反解得到:
\[\begin{cases} q_0=\frac{1}{2}\sqrt{R_{11}+R_{22}+R_{33}+1}\\ q_1=\frac{R_{23}-R_{32}}{2\sqrt{R_{11}+R_{22}+R_{33}+1}}\\ q_2=\frac{R_{31}-R_{13}}{2\sqrt{R_{11}+R_{22}+R_{33}+1}}\\ q_3=\frac{R_{12}-R_{21}}{2\sqrt{R_{11}+R_{22}+R_{33}+1}} \end{cases}\]通过欧拉角求解
首先通过转动矩阵反解欧拉角(Mathematica函数 EulerAngles),然后利用四元数与欧拉角的关系确定边界条件。四元数与欧拉角关系为:
Note: 这里有一点值得特别注意。之前通过四元数的变换为:
\[\begin{pmatrix} \mathbf{d}_1\\ \mathbf{d}_2\\ \mathbf{d}_3 \end{pmatrix} =\mathbf{Q} \begin{pmatrix} \mathbf{E_1}\\ \mathbf{E_2}\\ \mathbf{E_3} \end{pmatrix}\]这里标架矢量均为行矢量,但是我们一般定义转动矩阵如下:
\[\mathbf{b}=\mathbf{R}\mathbf{a}\]这里 $\mathbf{a},\mathbf{b}$ 均为列矢量,标架变换写成矩阵形式为:
\[\begin{pmatrix} \mathbf{d}_{1}^{t} & \mathbf{d}_{2}^{t} & \mathbf{d}_{3}^{t} \end{pmatrix} =\mathbf{R} \begin{pmatrix} \mathbf{E}_{1}^{t} & \mathbf{E}_{2}^{t} & \mathbf{E}_{3}^{t} \end{pmatrix}\]转置后为:
\[\begin{pmatrix} \mathbf{d}_1\\ \mathbf{d}_2\\ \mathbf{d}_3 \end{pmatrix} = \begin{pmatrix} \mathbf{E}_1\\ \mathbf{E}_2\\ \mathbf{E}_3 \end{pmatrix} \mathbf{R}^t\]由于单位矩阵是对称的,因此有:
\[\begin{pmatrix} \mathbf{d}_1\\ \mathbf{d}_2\\ \mathbf{d}_3 \end{pmatrix} =\mathbf{R}^t \begin{pmatrix} \mathbf{E}_1\\ \mathbf{E}_2\\ \mathbf{E}_3 \end{pmatrix}\]从 Eq. (8) 和 Eq. (11) 可以看出:$\mathbf{Q}=\mathbf{R}^t$ 这一点在利用 Mathematica 求解欧拉角的过程中需要特别注意。
符号计算程序
四元数直接求解:
Clear["`*"]
fQ[R_] :=
Module[{q0, q1, q2, q3}, {q0 = 1/2 Sqrt[Tr[R] + 1],
q1 = (R[[2, 3]] - R[[3, 2]])/(4 q0),
q2 = (R[[3, 1]] - R[[1, 3]])/(4 q0),
q3 = (R[[1, 2]] - R[[2, 1]])/(4 q0)}]
欧拉角间接求解:
Clear["`*"]
fE[R_] :=
Module[{q0, q1, q2, q3, f}, {f = EulerAngles[R // Transpose];
q0 = Cos[f[[2]]/2] Cos[(f[[1]] + f[[3]])/2],
q1 = Sin[f[[2]]/2] Sin[(f[[3]] - f[[1]])/2],
q2 = Sin[f[[2]]/2] Cos[(f[[3]] - f[[1]])/2],
q3 = Cos[f[[2]]/2] Sin[(f[[1]] + f[[3]])/2]}]
下面我们编写符号计算程序实现上面两种求解边界条件的方式,并通过案例进行验证。
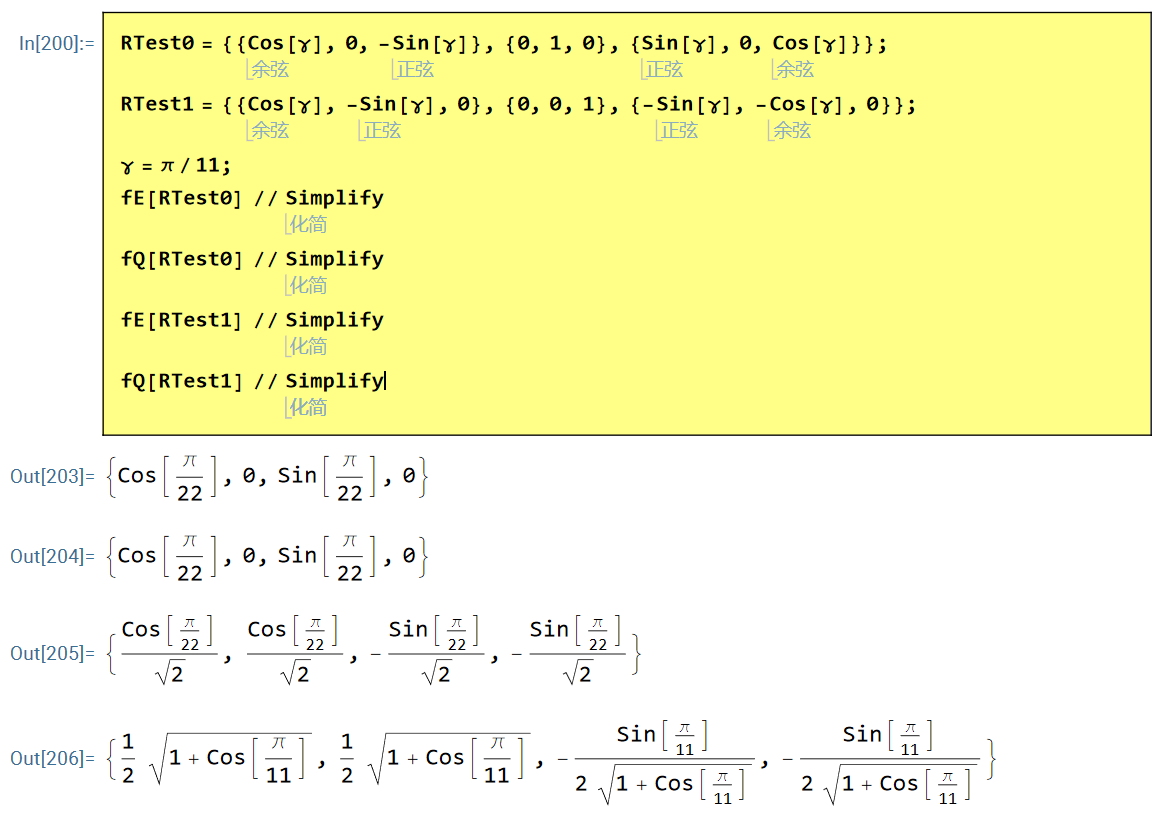
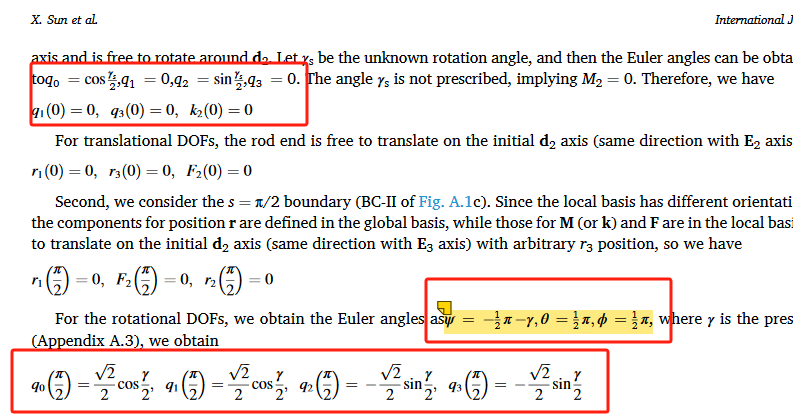
案例一:IJSS 248 (2022) 111685
该文献中杆的左、右两端局部标架(行向量形式)分别定义为:
左端局部标架 $\mathbf{D}_0$:
\[\begin{pmatrix} \mathbf{d}_1^t \\ \mathbf{d}_2^t \\ \mathbf{d}_3^t \end{pmatrix} = \begin{pmatrix} \cos\gamma & 0 & -\sin\gamma \\ 0 & 1 & 0\\ \sin\gamma & 0 & \cos\gamma \end{pmatrix}\]右端局部标架 $\mathbf{D}_1$:
\[\begin{pmatrix} \mathbf{d}_1^t \\ \mathbf{d}_2^t \\ \mathbf{d}_3^t \end{pmatrix} = \begin{pmatrix} \cos\gamma & -\sin\gamma & 0 \\ 0 & 0 & 1\\ -\sin\gamma & -\cos\gamma & 0 \end{pmatrix}\]将上述标架矩阵视为旋转矩阵 $\mathbf{R}$(注意此处为行向量形式,对应前文推导中的 $\mathbf{R}^T$),代入上述 Mathematica 程序中,即可解得与原文一致的边界条件(四元数 $q_0, q_1, q_2, q_3$ 的初始值)。
计算结果示意图如下:
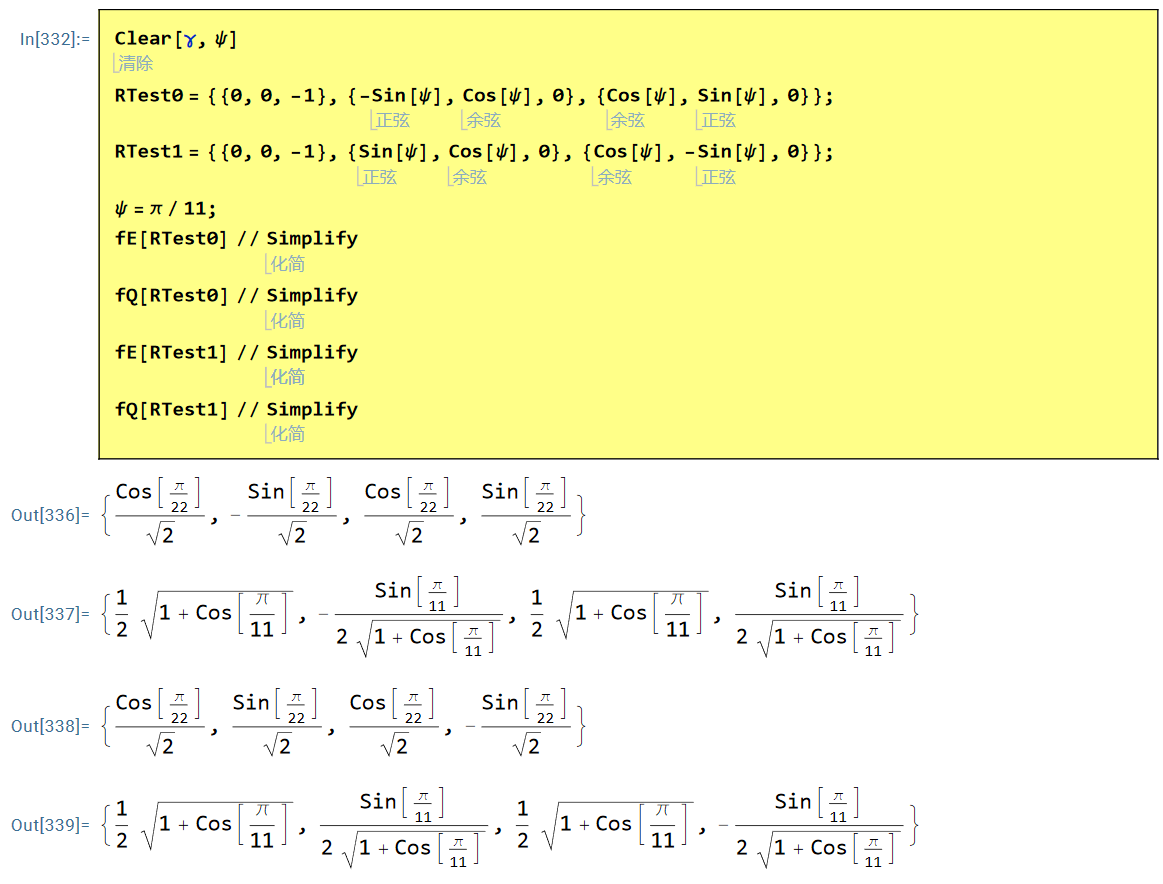
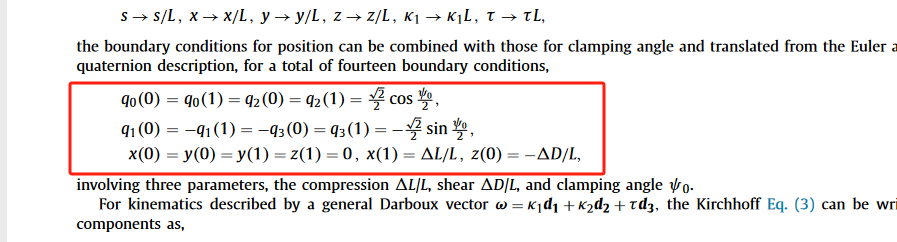
案例二:JMPS 122 (2019) 657–685
该文献中杆的左、右两端局部标架(行向量形式)分别定义为:
左端局部标架 $\mathbf{D}_0$:
\[\left( \begin{matrix} \mathbf{d}_1^t \\ \mathbf{d}_2^t \\ \mathbf{d}_3^t \end{matrix} \right) = \left( \begin{matrix} 0 & 0 & -1 \\ -\sin\psi & \cos\psi & 0 \\ \cos\psi & \sin\psi & 0 \end{matrix} \right)\]右端局部标架 $\mathbf{D}_1$:
\[\begin{pmatrix} \mathbf{d}_1^t \\ \mathbf{d}_2^t \\ \mathbf{d}_3^t \end{pmatrix}=\begin{pmatrix} 0 & 0 & -1 \\ \sin\psi & \cos\psi & 0\\ \cos\psi & -\sin\psi & 0 \end{pmatrix}\]同理,将上述矩阵代入 Mathematica 程序,即可得到对应的四元数边界条件,结果与原文一致。
计算结果示意图如下: