
圆柱与带状梁的接触
Published:
本篇笔记介绍了圆柱与带状梁之间的接触问题。
我们考虑悬臂梁与刚性圆柱之间的接触问题,如图1(b)所示:
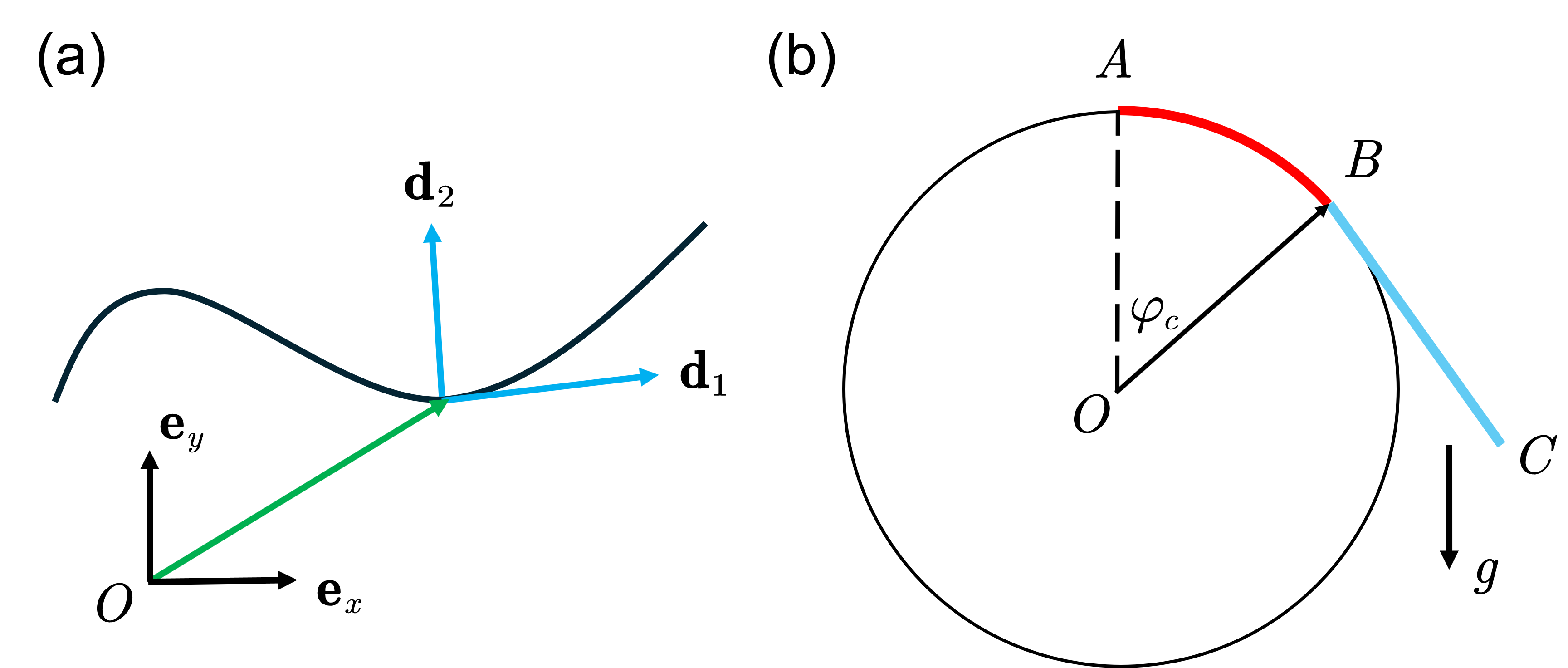
梁可以分为两部分:接触部分(CP,A-B,红色)和非接触部分(NCP,B-C,蓝色)。接触部分的几何形状完全由圆柱决定,而非接触部分的构型由B点的力与重力共同决定。
我们考虑如图1(a)所示的二维弹性线,向量方程可以写为:
\[\begin{cases} \mathbf{F}_s+g\mathbf{e}_z=0\\ \mathbf{M}_s+\mathbf{d}_1\times \mathbf{F}=0\\ \mathbf{r}_s=\mathbf{d}_1\\ \end{cases}\]我们将力 $\mathbf{F}$ 在局部标架中展开,得到 $\mathbf{F}=F_1\mathbf{d}_1+F_2\mathbf{d}_2$。经过二维旋转的一些简化后,得到控制方程的分量形式:
\[\begin{cases} \left( F_1 \right) _s-\omega F_2-g\sin \theta =0\\ \left( F_2 \right) _s+\omega F_1-g\cos \theta +p(s)=0\\ B\left( \omega \right) _s+F_2=0\\ \left( \theta \right) _s=\omega\\ \left( x \right) _s=\cos \theta\\ \left( y \right) _s=\sin \theta\\ \end{cases} \tag{1}\]其中 $g$ 是重力,$p(s)$ 是来自圆柱的接触压力。
注意对于红色部分,我们具有几何约束 $\omega=-1/R$,方程(1)可以简化为:
\[\begin{cases} F_1=Rg\left( \cos \theta -\cos \varphi _c \right) +F_{1}^{B}\\ F_2=0\\ p\left( s \right) =g\left( 2\cos \theta -\cos \varphi _c \right) +F_{1}^{B}/R\\ \end{cases}\]注意B点的接触压力为0,即 $p(\varphi_c)=0$,我们可以求解连接点B处的轴力:
\[F_1^B=-gR\cos\varphi_c\]现在我们将求解NCP,边界条件可以写为:
\[\begin{cases} F_1\left( L-R\varphi _c \right) =0\\ F_2\left( L-R\varphi _c \right) =0\\ \omega \left( L-R\varphi _c \right) =0\\ \omega\left( 0 \right) =-1/R\\ \theta \left( 0 \right) =-\varphi _c\\ y\left( 0 \right) =R\cos \varphi _c\\ x\left( 0 \right) =R\sin \varphi _c\\ \end{cases}\]实际上,6个边界条件足以求解BVP,然而这里有7个边界条件,这意味着额外的1个边界条件将用于求解 $\varphi_c$。
注意轴力和剪力在B点不连续,这是由弹性线在接触点的平衡要求所决定的。这是由于横截面的变形所致。
核心思想是: 猜测连接点的位置和转角,然后求解CP和NCP的常微分方程,这将确保曲率连续!
未来可能会发展一个考虑横截面剪切效应的更精确模型。