

一根绳子,当受到一定的力,弯矩,扭矩时他的形状是什么样的?
- 预备工作
- 建立Euler弹性线方程
- 分析求解
- 数值求解
- 黎曼空间中的弹性线
- 附录Cpp代码
预备工作
分部积分法的妙用
浅谈分部积分公式中通过迭代得到了:
通过这个公式也得到了高阶Lagrange方程,这里简单的总结一下,方便后边使用:
含有高阶导数的Lagrange方程为:
对应守恒量:
几个椭圆函数
一些符号变换而已
建立Euler弹性线方程
不考虑弹性线的伸长时,弹性线的能量可以写为:
这个不考虑伸长有一定的物理意义,并不意味着弹性线的弹性系数很大。比如说一根松弛状态弯曲的橡皮筋,虽然橡皮筋很容易伸缩变形,但是由于绳子并没有绷紧,因此也可以看成不考虑弯曲能的情况。
在不考虑转动时,能量仅仅由曲率进行贡献。
曲率与矢径的关系为:
利用Lagrange乘数法,得到能量泛函:
这时应用前面的二阶导数的Lagrange方程,得到:
守恒量为:
上面得到的只是矢径需要满足的关系,要想把矢径和曲线的内禀量(什么是内禀量?内禀量是系统本身的性质,不随坐标系选取而改变,这里指的是曲率和挠率。)联系起来,需要把矢径投影到Frenet标架(不一定是Frenet标架,只要是曲线的随体标架都可以)中,并利用Frenet关系进行化简。
(Add:如何理解内禀坐标? 首先,对于一个空间曲线来说,选取不同位置为基点进行描述,矢径参数方程肯定是不同的,但是
满足关系式:
投影后得到:(略去大量计算)
要满足必须让三个分量为零:
上式积分得到:
后续只需要通过边界条件求解方程,然后把参数空间
分析求解
?????????????
数值求解
弹性线问题中,为了方便起见,总是以内禀参数进行求解的。但是要想进行可视化,必须进行坐标的变换,简而言之就是从内禀参数空间变换到欧式空间。这个变换过程就是求解Frenet方程。
数值求解的关键: 求解Frenet方程,把参数空间转化为欧氏空间。
首先会想到二维情况如下图: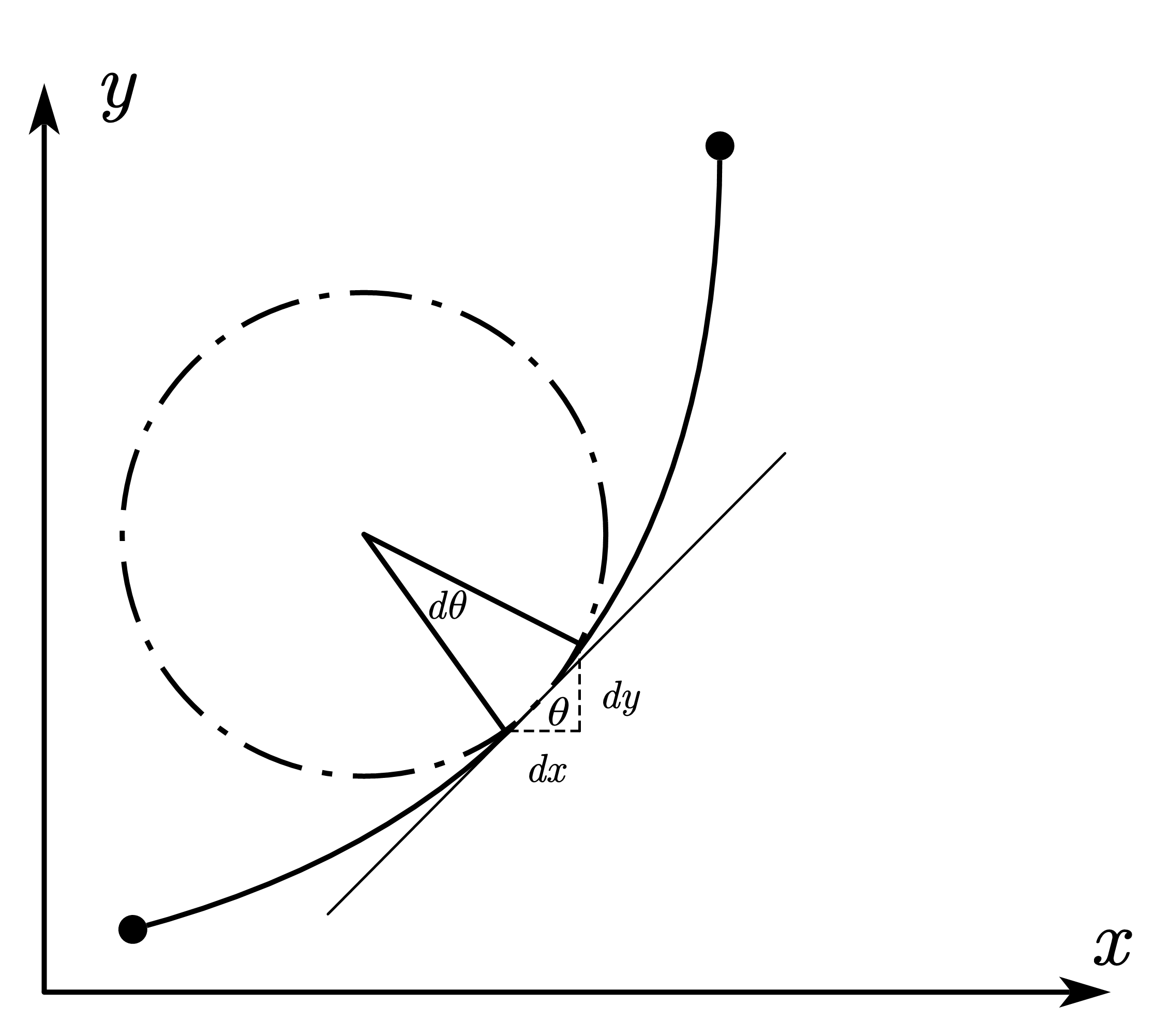
猛一看这不是很简单嘛。啪!很快啊!于是通过几何关系很快就写出了参数空间与欧氏空间的变换关系。
离散化:
但是,如果考虑三维空间的情况这个几何关系是什么呢?
也就是说,当从曲线上的一点
要想和二维情况一样通过几何直觉来得到这个关系就很难了。
于是,可以发现,上面的通过所谓的“几何直觉”得到转换关系的过程只不过是参数化的过程,借助中间参数
三维可不可以照猫画虎来一遍?
于是想到,同样把弧长进行参数化如下:
通过Frenet方程求解得到:
到这一步,只要求解出
绕了一个大弯,发现绕进了胡同里。
既然参数空间的转化与Frenet方程有关,为何不直接求解Frenet方程?
那么如何把Frenet方程转化到欧氏空间呢?
通过
至此已经有了求解思路,感觉这个思考过程很有意思。
也许前面的弯路并没有白走,二维情况下的几何直觉引导我们想到三维情况。而三维情况下几何直觉不管用了,又得回去归纳前面通过“几何直觉”求解二维问题的流程。好不容易归纳好了,却发现同样的方法三维问题根本没法解。而这个时候发现了三维求解过程中与二维情况的不同:利用了Frenet方程。然后想到可能与Frenet方程有关,最终去求解Frenet方程,得到了参数空间向欧氏空间转换的一般方法。
离散Frenet方程以及
至此,Euler弹性线(仅考虑弯曲能)的求解思路总结如下:
- 求解弹性线方程
- 得到内禀参数
的演化规律 - 通过Frenet方程求解
标架的演化规律 - 通过
把参数空间映射到欧氏空间
PS: 以上是一个关于曲率的二阶方程,可以通过给定初始曲率以及曲率导数进行迭代(初值问题),也可以通过给定两个端点的导数利用打靶法进行求解(边值问题)。此外,Frenet方程的求解用Euler法会产生很大误差,连求解基本的圆误差都会很大,用预报矫正算法就会好很多。
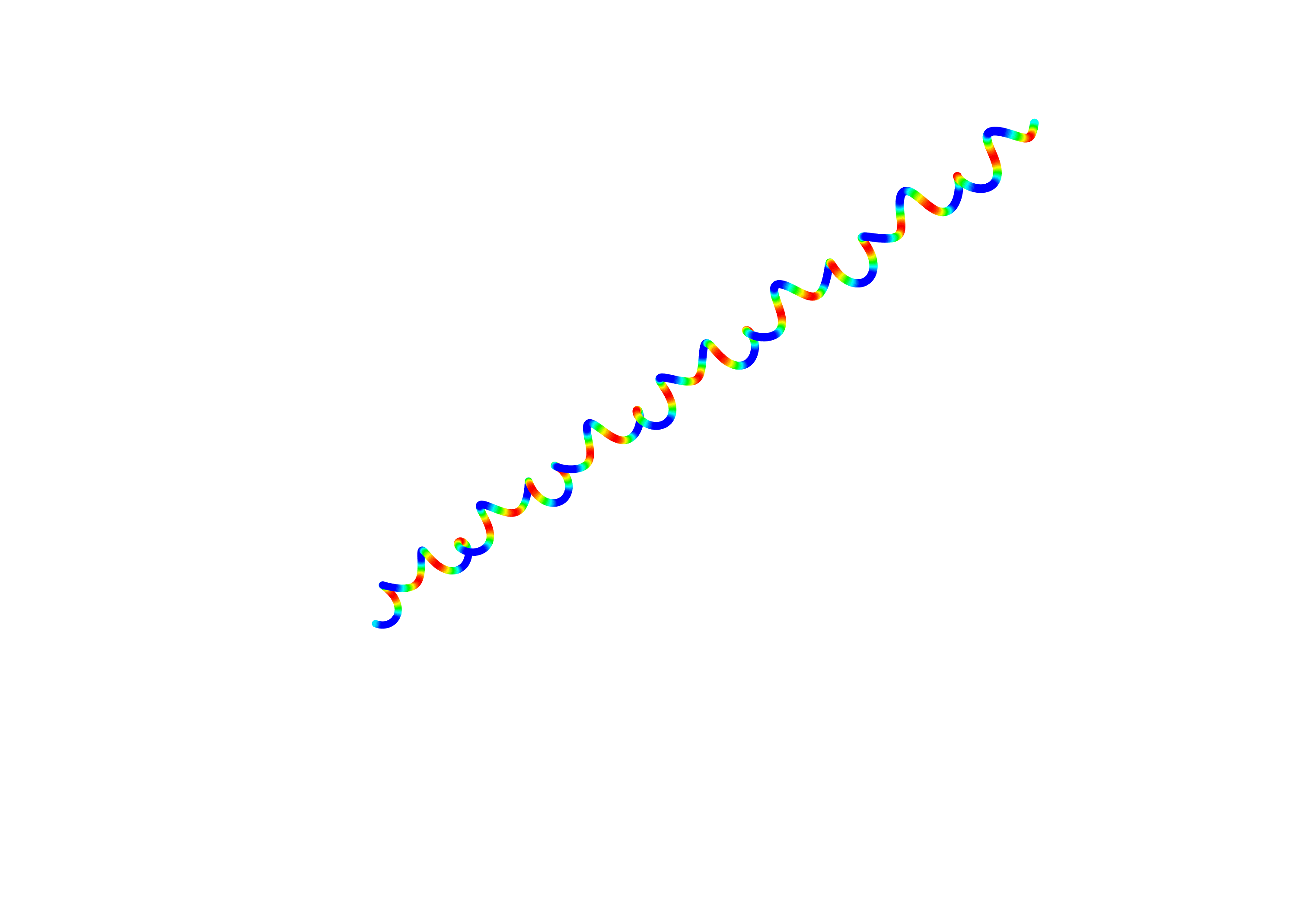
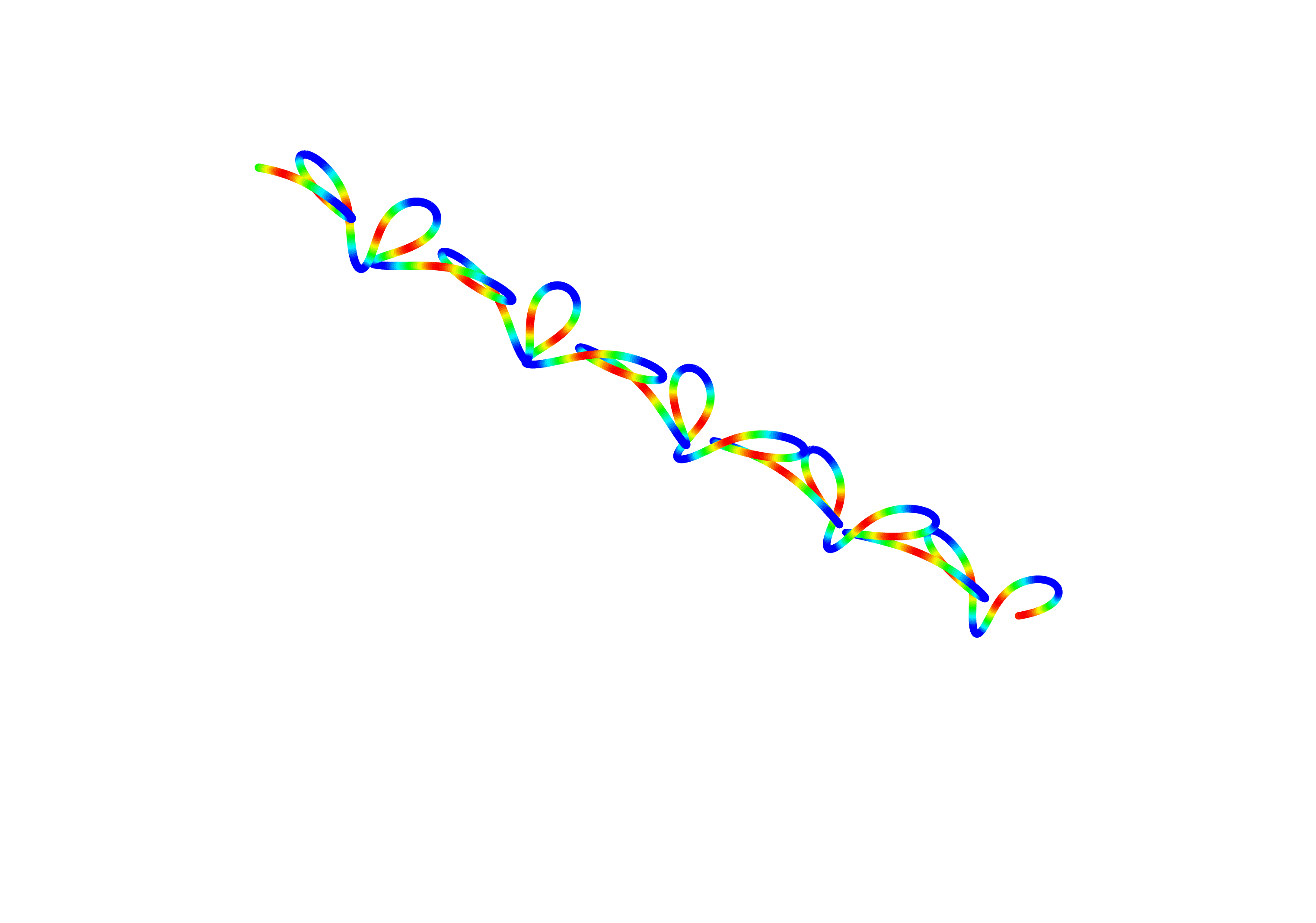
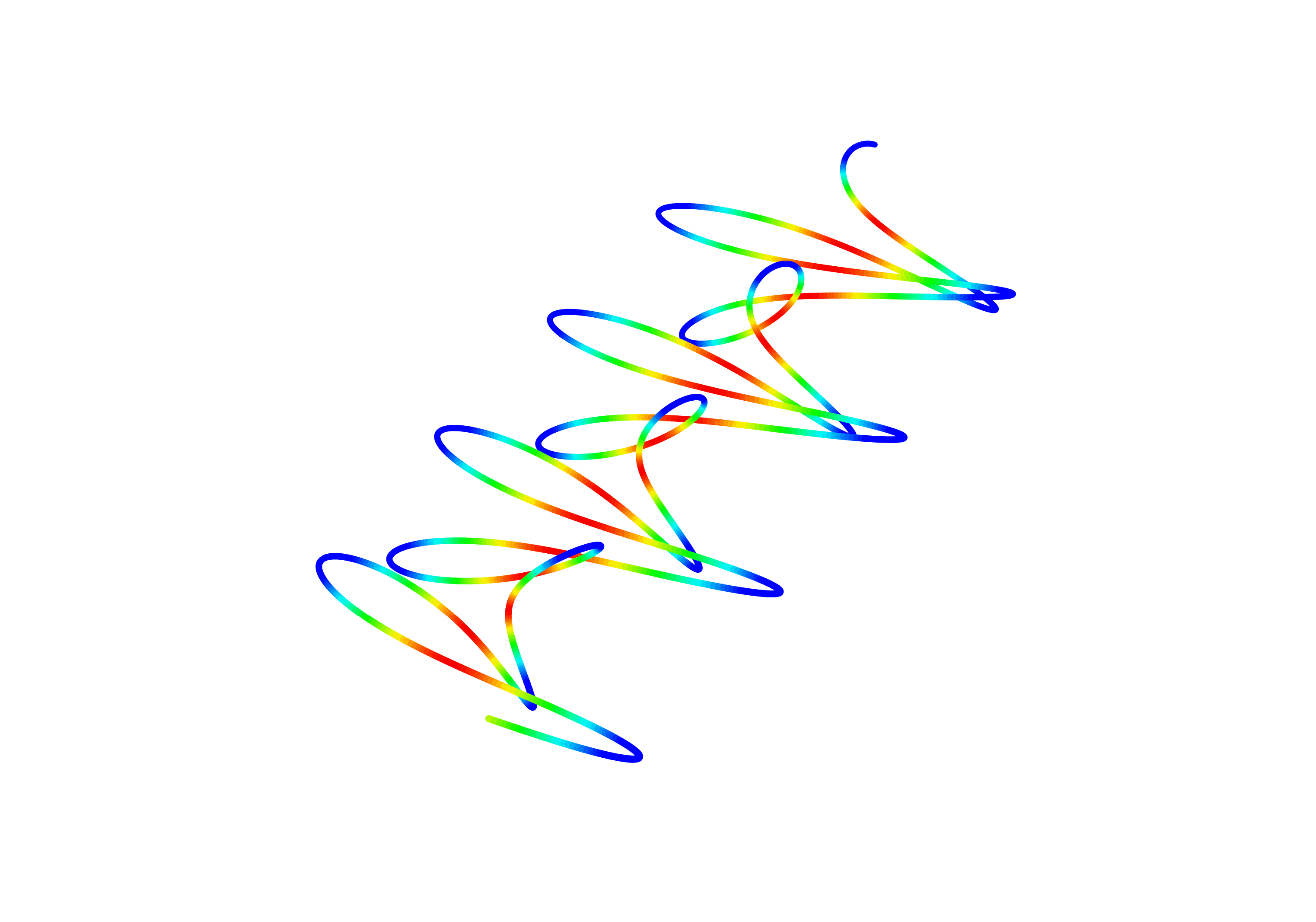
上面已经给出了求解的方法,下面是几个求解结果的可视化(按照曲率着色)
| s | ||||
|---|---|---|---|---|
| 2 | 1 | 2 | 1 | 50 |
| 1.5 | 1 | 0.7 | 0.8 | 50 |
| 0.7 | 1 | 2 | 0.75 | 50 |
黎曼空间中的弹性线
?????????????
Cpp代码
主函数(main.cpp):
1 | #############Elastica类(EulerElasticaRod.h)############# |
作者: 得意喵~